Linux/ROS Installation¶
ROS only runs natively in Linux so we are only supporting using the simulator in Ubuntu at this time. If you do not have ROS Melodic installed, follow the instructions from http://wiki.ros.org/melodic/Installation/Ubuntu.
Dependencies¶
You will need the following dependences:
tf2_geometry_msgs
ackermann_msgs
joy
map_server
Install them using
sudo apt-get install ros-melodic-tf2-geometry-msgs ros-melodic-ackermann-msgs ros-melodic-joy ros-melodic-map-server
The full list of dependencies can be found in the package.xml file.
Package¶
To install the simulator package, clone the simulator repository into your catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/f1tenth/f1tenth_simulator.git
Then run catkin_make to build it:
cd ~/catkin_ws
catkin_make
source devel/setup.bash
Quick Start¶
To run the simulator on its own, run:
roslaunch f1tenth_simulator simulator.launch
This will launch everything you need for a full simulation: roscore, the simulator, a preselected map, a model of the racecar, and the joystick server.
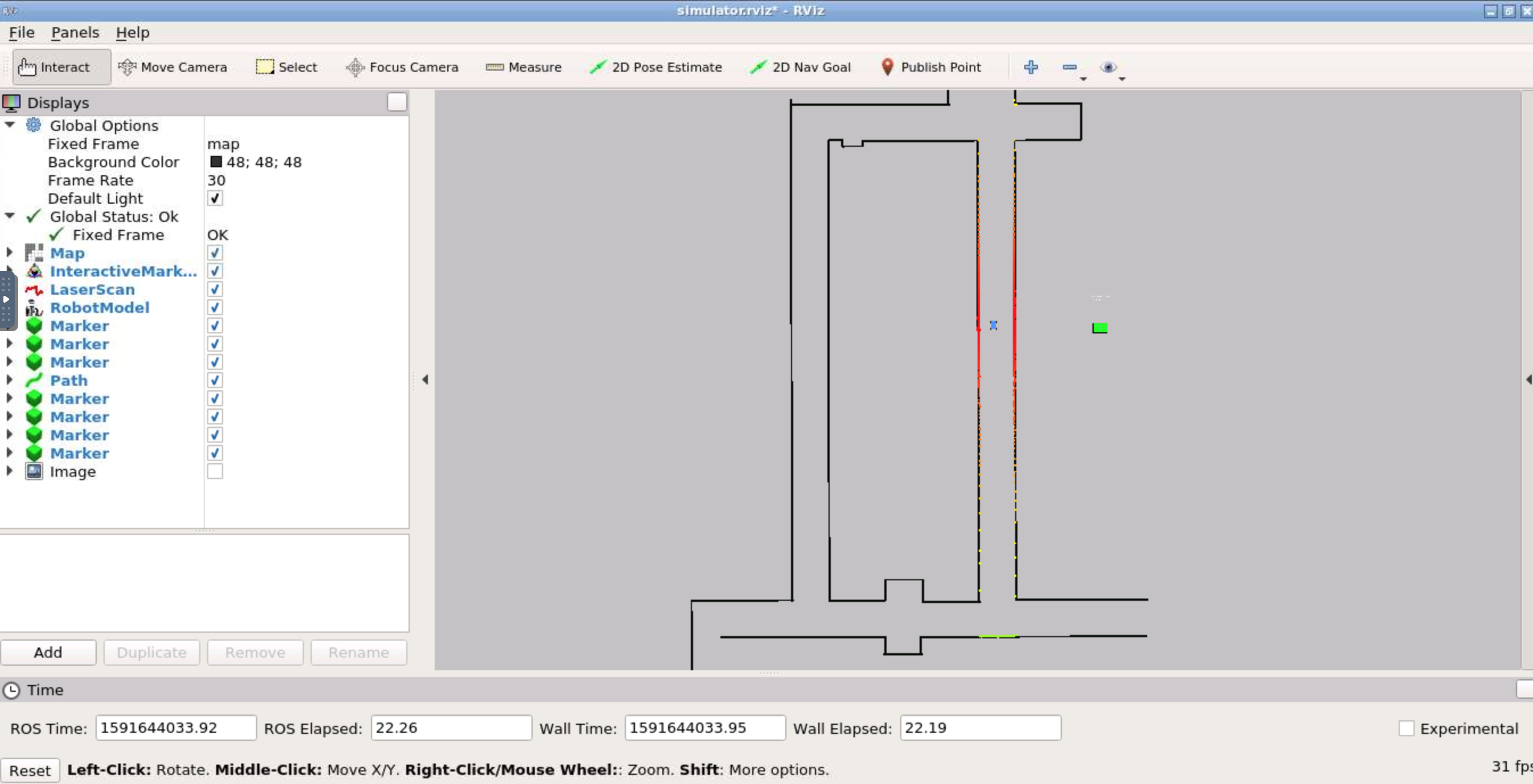
Full simulation launched.¶